本文主要介绍PhysX刚体动力学相关的内部机制和使用方法。
PhysX物理引擎系列记录了在实际项目中使用Nvdia PhysX 3.4物理引擎(Code, Doc)的一些经验,有不少对官方资料的补充。
Warm-up
Let’s start with some key concepts:
- Both
KinematicandDynamicrigidbodies are represented asPxRigidDynamicin PhysX. You can switch between them at runtime usingPxRigidBody::setRigidBodyFlag(PxRigidBodyFlag::eKINEMATIC, true). KinematicandStaticactors remain stationary unless explicitly moved in code.- Moving
Staticactors can result in incorrect collision behavior with dynamic actors. - When moving
Kinematicactors, always usePxRigidDynamic::setKinematicTargeteach frame instead ofPxRigidActor::setGlobalPoseto ensure correct collision detection with dynamic actors.
This post focuses on dynamic rigidbody movement, covering topics such as force and torque, gravity, sleeping, and more.
Below are the essential physical concepts with their mathematical formulas:
| Translation | formular | Rotation | formular |
|---|---|---|---|
| Position | \(\vec{x}\) | Orientation (3x3 matrix) | \(\mathbf{R}\) |
| Linear Velocity | \(\vec{v}=\frac{d\vec{x}}{dt}\) | Angular Velocity | \(\vec{\omega}=\frac{\vec{v}\times\vec{r}}{\lVert{\vec{r}}\rVert^2}\) |
| Linear Acceleration | \(\vec{a}=\frac{d\vec{v}}{dt}\) | Angular Acceleration | \(\vec{\alpha}=\frac{d\vec{\omega}}{dt}\) |
| Mass | \(M=\sum{m_i}\) | Intertia tensor | \(\mathbf{I}=\mathbf{R}\mathbf{I}_0\mathbf{R}^T\) |
| Linear momententum | \(\vec{p}=M\vec{v}\) | Angular momententum | \(\vec{L}=\mathbf{I}\vec{\omega}\) |
| Force | \(\vec{F}=\frac{d\vec{p}}{dt}=m\vec{a}\) | Torque | \(\vec{\tau}=\frac{d\vec{L}}{dt}\) |
Setup Rigidbody
A dynamic actor has 3 mass-related properties: mass, center of mass, and inertia tensor.
Setting mass to 0 means it cannot move.Although the documentation suggests 0 is acceptable for mass, it actually causes random crashes. See Golden Tips for details.Center of mass is the point where applied forces generate translation without rotation. It’s defined in local space as a Vector3, with a default value of (0,0,0).
Moment of inertia is a scalar value describing the resistance to rotation about a specific axis, while the inertia tensor is a 3x3 matrix describing resistance to rotation about any axis. Setting the inertia tensor to (0,0,0) prevents rotation around any axis.
The simplest way to calculate mass properties is to use PxRigidBodyExt::updateMassAndInertia. You don’t need setMassAndUpdateInertia.
In the official North Pole demo (PhysX_3.4\Samples\SampleNorthPole\SampleNorthPoleDynamics.cpp), all objects have a low center of mass but use different configurations to achieve varied physical behaviors.
Here’s my code snippet for initializing a dynamic rigidbody:
void ActorWrapper::InitRigidbody(bool useGravity, float mass, const PxVec3& centerOfMass, const PxVec3& interiaTensor, const PxVec3& velocity, float drag, const PxVec3& angularVelocity, float maxAngularVelocity, float angularDrag, int constrainFlags)
{
PxRigidDynamic* actor = PxActorAs<PxRigidDynamic>();
if (actor == NULL || actor->getScene() == NULL)
{
return;
}
actor->setActorFlag(PxActorFlag::eDISABLE_GRAVITY, !useGravity);
actor->setMaxAngularVelocity(maxAngularVelocity);
//SetConstrains (todo)
actor->setLinearDamping(drag);
angularDrag = PxMax(0.01f, angularDrag); // 0 is unstable for angular drag
actor->setAngularDamping(angularDrag);
actor->setMass(mass);
actor->setCMassLocalPose(PxTransform(centerOfMass));
actor->setMassSpaceInertiaTensor(interiaTensor);
// not kinematic
if (!(actor->getRigidBodyFlags() & PxRigidBodyFlag::eKINEMATIC))
{
// if has constrain, modify velocity here
actor->setLinearVelocity(velocity);
actor->setAngularVelocity(angularVelocity);
}
}
void ActorWrapper::SetDensity(float density)
{
PxRigidDynamic* actor = PxActorAs<PxRigidDynamic>();
if (actor == NULL || actor->getScene() == NULL)
{
return;
}
density = PxClamp(density, 0.0f, 1e6f);
PxRigidBodyExt::updateMassAndInertia(*actor, density);
}
Fix Large Mass
When a rigidbody with large mass (> 100kg) collides with other objects (e.g., static ground), the simulation can quickly become unrealistic or even collapse.
The image below shows 5 rigidbodies falling to the ground with masses of 1kg, 10kg, 100kg, 1000kg, and 10,000kg (from left to right).
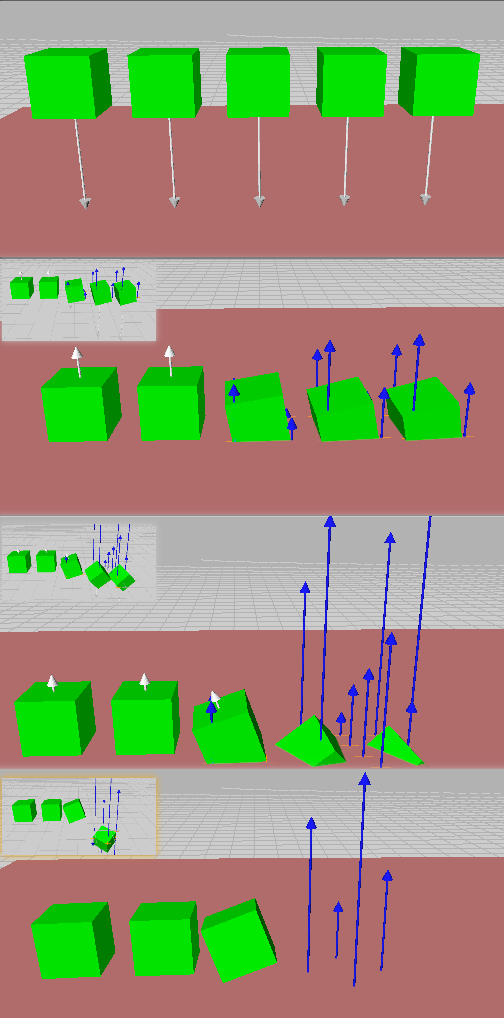
There are several parameters you can tune to stabilize the simulation. The configuration below can boost the maximum supported mass from ~400kg to ~3800kg:
Scene-level
sceneDesc.flags |= PxSceneFlag::eENABLE_PCM- PCM (Persistent Contact Manifold) makes objects more stable when at rest.sceneDesc.flags |= PxSceneFlag::eADAPTIVE_FORCE- Adaptive force makes stacked objects more stable.
Actor-level
PxRigidDynamic::setSolverIterationCounts(32,8)- This is the most significant change for stability, though it comes at a performance cost.PxRigidbody::setMaxDepenetrationVelocity(10)- This prevents excessive velocity during collision resolution.
Shape-level
PxShape::setContactOffset(0.02)- PhysX will resolve collisions earlier, improving stability.
Add Force & Torque
addForcecauses translationaddTorquecauses rotationaddForceAtPoscauses both translation and rotation if the position is not at the center of mass
Both force and torque support 4 modes:
| PxForceMode | Physics Equivalent |
|---|---|
| eFORCE | \(ma\) |
| eIMPULSE | \(mat\) |
| eVELOCITY_CHANGE | \(at\) |
| eACCELERATION | \(a\) |
Here’s my code snippet for implementing addForce and addTorque:
void ActorWrapper::AddForce(const PxVec3& force, int forceMode)
{
// validation
if (force.IsAllZero() || !force.IsFinite())
{
return;
}
PxRigidDynamic* actor = GetRigidDynamicActor();
if (actor == NULL || actor->getScene() == NULL || (actor->getRigidBodyFlags() & PxRigidBodyFlag::eKINEMATIC))
{
return;
}
actor->addForce(force, forceMode);
}
void ActorWrapper::AddRelativeForce(const PxVec3& force, int forceMode)
{
// same validation as AddForce
PxVec3 globalForce = actor->getGlobalPose().rotate(localForce);
actor->addForce(globalForce, forceMode);
}
void ActorWrapper::AddTorque(const PxVec3& torque, int forceMode)
{
// same validation as AddForce
actor->addTorque(torque, forceMode);
}
void ActorWrapper::AddRelativeTorque(const PxVec3& torque, int forceMode)
{
// same validation as AddForce
PxVec3 globalTorque = actor->getGlobalPose().rotate(torque);
actor->addForce(globalForce, forceMode);
}
void ActorWrapper::UGCAddForceAtPosition(const PxVec3& force, int forceMode, const PxVec3& position)
{
// same validation as AddForce
if (!position.IsFinite())
{
return;
}
// Only eFORCE and eIMPULSE are supported!
if (forceMode == PxForceMode::eFORCE || forceMode == PxForceMode::eIMPULSE) {
PxRigidBodyExt::addForceAtPos(*actor, force, position);
}
}
Change Gravity
Gravity is scene-wide for all dynamic rigidbodies and is set using PxScene::setGravity().
You can exclude specific dynamic actors from scene-wide gravity by calling PxActor::setActorFlag(PxActorFlag::eDISABLE_GRAVITY, true). Then manually apply forces each frame using addForce to implement custom gravity for that actor.
Sleep & Awake
Why Sleep Matters
Sleeping rigidbodies have virtually no performance cost. Putting less important rigidbodies to sleep can significantly reduce CPU usage, especially when dealing with thousands of objects.
Sleep Mechanism
An actor goes to sleep when its mass-normalized kinetic energy (i.e., \(\frac{1}{2}v^2\)) remains below a threshold for a certain duration. Internally, PhysX uses a wake-counter; when it reaches 0, the actor becomes a candidate for sleeping.
The default threshold is \(5∗10^{−5}∗v^2\), where \(v\) is PxTolerancesScale.velocity. This means actors are allowed to sleep when their velocity drops below 1% of PxTolerancesScale.velocity. You can customize this threshold using PxRigidDynamic::setSleepThreshold.
You can also directly control the wake-counter using PxRigidDynamic::setWakeCounter.
Common APIs for sleeping (only for dynamic actors):
| Name | Notes |
|---|---|
| PxRigidDynamic::setSleepThreshold | Set the energy threshold for sleeping |
| PxRigidDynamic::setWakeCounter | Calling on a sleeping rigidbody will automatically wake it up |
| PxRigidDynamic::isSleeping() | Check if the actor is currently sleeping |
| PxRigidDynamic::wakeUp() | Force the actor to wake up |
| PxRigidDynamic::putToSleep() | Force the actor to sleep |
| PxSimulationEventCallback::onWake/onSleep | To receive these events, set the flag: PxActorFlag::eSEND_SLEEP_NOTIFIES |
Awake Mechanism
The following actions will wake an actor up:
- Calling
PxRigidDynamic::setKinematicTarget()on a kinematic actor - Calling
PxRigidActor::setGlobalPose()with the autowake parameter set to true (default) - Raising the
PxActorFlag::eDISABLE_SIMULATIONflag - Calling
PxScene::resetFiltering() - Calling
PxShape::setSimulationFilterData()that results in a different filtering outcome - Contact with an actor that is awake
- A touching rigid actor is removed from the scene
- Loss of contact with a static rigid actor
- Loss of contact with a dynamic rigid actor (wakes up in the next simulation step)
- Being hit by a two-way interaction particle
Golden Tips
- When calling
PxRigidBodyExt::setMassAndUpdateInertia(actor, mass), ensuremassis above zero for dynamic rigidbodies, otherwise random crashes will occur during collisions. - When calling
PxRigidDynamic::setAngularDamping(value), ensurevalueis above zero, otherwise rotation becomes unstable. - Changing the scene-wide gravity value will NOT automatically wake sleeping rigidbodies. Call
PxRigidDynamic::wakeUp()manually if needed.